生産性革命プロジェクト


環境ブロックでは、国土交通省の施策である生産性革命プロジェクトのひとつ「i-Constructionの推進」を受け、平成28年(2016年)よりICT施工に取り組んでいます。
出典:国土交通省ホームページ



建設ICT推進室

平成29年(2017年)からは、ICT施工を外注に頼ることなく、内製化するため、
「建設ICT推進室」を組織し、技術の蓄積を図っています。
ICTの活用 現場を3次元で取得する測量
モータードライブ型 トータルステーション

トプコンGTシリーズ

リモートコントロールシステム
RTK GNSS測量器

HiPer SR

データコレクタ
レイアウトナビゲーター 望遠鏡を搭載しないTS

快速ナビ

LN-100(杭ナビ)
地上型レーザー スキャナ―

GLS2000
UAV(ドローン)

PHANTOM4RTK

INSPIRE1

PHANTOM3
産業用ドローン(UAV) マトリス300RTK
MATRICE300RTK
- 風速15mまで耐え得る性能
- 防水防塵性能を実現
- 安定した電波電装と飛距離を実現
- RTK搭載による極めて高い飛行精度
- 最大飛行時間55分
- 機体重量6kgで3kgまでのペイロードを積載可能
- 6方向検知システムによる安全性の確保

DJI MARICE300RTKカタログより
搭載カメラ
- 高解析度ズームカメラ(光学20倍、最大200倍望遠レンズ)
- 広角レンズ、レーザー距離計1200m
- 高解析度赤外線カメラ

現場を3次元で取得する測量
モータードライブ型
トータルステーション
レイアウトナビゲーター
杭ナビ+快速ナビ
地上型
レーザースキャナー
地上型レーザースキャナー

- スキャン距離、最大350m
- 簡単機械設置/高速スキャン/Dualカメラ
- 1秒間に最大12万点の座標を取得
- 360°×270°のフルドームスキャン
- 高品質データを観測

TOPCON GLS2000カタログより

レーザースキャナーにより
取得した3次元点群
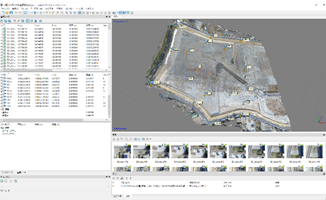
ドローンが連続撮影した写真から3次元点群を構築(SfM)
3次元設計データによる半自動運転
マシンコントロール
バックホウ
マシンコントロール
ブルドーザー
マシンコントロール
モーターグレーダー
3次元設計データによる運転補助
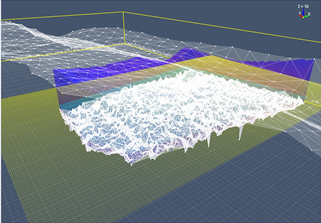
河床(川底)掘削後のデータ
ICT建機は、作業軌跡をデータと記録することができます。
また目視できない河床(川底)をどの様に掘ったか可視でき、
データ処理することで掘った量を把握できます。
マシンガイダンスバックホウ
河床の掘削状況を可視化

CIMの導入
CIMを設計照査に利用すると、工事の問題を施工前に発見できます。


CIMデータを現況データと重ねると完成イメージを伝えやすい



3Dデータからヴァーチャルリアリティデータを構築
クロスカントリーコースの走行イメージ
- 構造物の距離感
- 起伏の様子
- 障害物
など感覚的に伝わりやすい
-1.jpg)